








Water rocket sets new world record for number of cameras flown on a single flight.
Introduction:
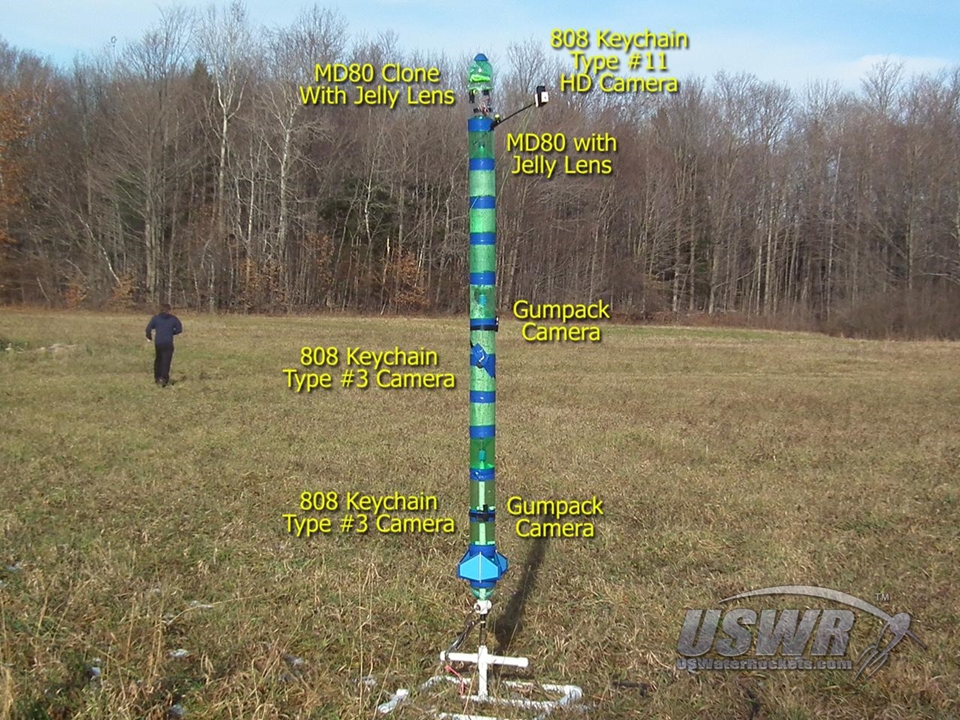
This launch report documents a single flight which was launched on November 25, 2011 which set a new unofficial world record for the largest number of cameras ever flown on a Water Rocket. The new record was not the original purpose of the flight, but since we needed a number of cameras onboard to record the test data, we decided it would be fun to scrape together as many working cameras as we could, and place them at various locations on the rocket to try and make a new record. Another experiment which we were conducting on this launch was to test a type of lens called "Jelly Lens" on a Water Rocket for the first time.We had recently made some software improvements to our free ServoChron 2 dual deploy servo timer software, and we wanted to capture video of the new software in operation to see if there were any issues that needed to be resolved. We also were anxious to obtain some showing the ServoChron working in conjunction with our newly invented Axial Parachute Deploy System, so that we would have a nice demonstration video to illustrate the systems in operation.


We arrived at the launch area, and set up quickly, thanks to having prepared most of the rocket beforehand. We had even prefilled the rocket with water and used our removable launch tube system to keep the water from draining out of the rocket during transportation. Once the rocket was set up, all of the cameras were turned on and set to record video. We then quickly filled the rocket to 100PSI and launched the rocket at 2:01PM. We had been in a hurry to launch, because the temperature was 45 Degrees Fahrenheit (about 7 Degrees C), and we were fearful that the cold would shorten the battery life in the cameras, so we were trying to launch as quickly as possible. In our haste, we failed to notice that the rubber band of the Axial Deploy System had been working loose from the lobes that secure the nosecone to the rocket. All of the handling of the rocket during transportation must have moved the rubber band from the correct location. The rubber was likely stiffer due to the cold and had less friction to secure it as well.









The root cause of the failure was described above, where the rubber band had moved out of the correct position on the nosecone, which caused the nose to deploy thanks to the deceleration right after burnout.





The rocket was saved, and the cause of the near accident was simply human error, rather than a design error in the ServoChron or the Axial Deploy system.


Here are some more highlights of the flight. As with all of our articles and tutorials, if you click on the thumbnail images, they will expand to a larger view and reveal extra commentary about the image:


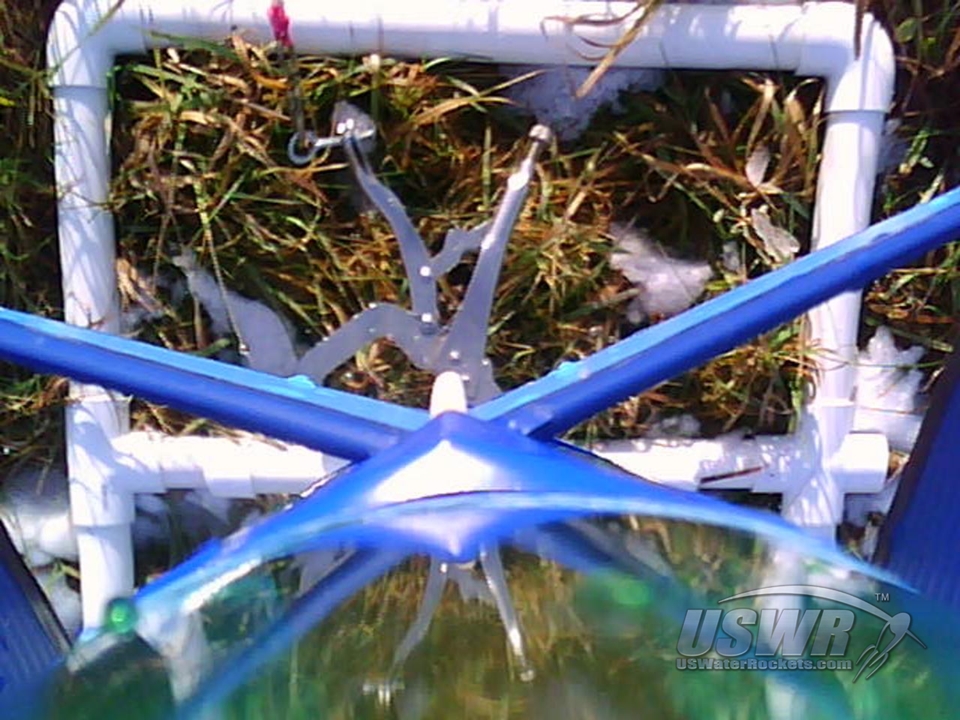
USWR Axial Deploy System.
If you would like to build your own ServoChron 2 Dual Parachute Deploy Servo Timer, click this link for the complete tutorial.
USWR Axial Deploy System.
Other tutorials showing how to build a water rocket similar to our B-2 15 liter water rocket can be found at our tutorial menu:
USWR Tutorials Menu.
7 Camera Servochron Test Flight Video: