A strong and reliable parachute design is very important to anyone wishing to develop a water rocket with a recovery system. Any system from a simple Air Flap mechanism to the sophisticated ServoChron™ electronic deploy system relies on a well made parachute. This tutorial will reveal the secrets to easily making a parachute that will safely recover your water rockets.
This tutorial will show a method for creating inter-bottle connectors which can be used to join together multiple bottles by the threaded necks. These bottle connectors are useful for Water Rockets because they allow for a modular approach to be applied to your rocket design, which simplifies construction and repair of a damaged rocket.
Nearly every water rocket design that you can construct will involve some sort of bottle cutting. This tutorial will show you an easy method for getting perfect cuts every time.
One set of Water Rocket components which are critical to a successful and stable flight are the fins. U.S. Water Rockets designed and tested a new idea for creating water rocket fins which is called the "Box Fin" design, to create a quick and easy method for adding fins to Water Rockets which were much more rugged than typical fins, yet easier to fabricate with a higher degree of accuracy. This tutorial will explain how to create a triple box fin for a water rocket.
The first improvement we will make is to modify the fin design so that it is adjustable to fit multiple bottle diameters. The next improvement we will make is to alter the attachment method for the fins. If you fly in an area prone to landing in trees, you can modify the design so that it will break away from the rocket with less force.
One of the most important components you will build for your water rocket is the nosecone. This tutorial will explain how to build a good looking nosecone that performs great too.
A relatively new building material used in the construction of water rockets is a corrugated plastic sheet or corriboard. It is also known under the tradenames of Corriflute, Coroplast, IntePro, Correx, Twinplast, or Corflute. This tutorial explains how to repurpose used corriflute for your water rockets.
This tutorial will show you how to prepare your bottles for Water Rocket Construction. To prepare your bottles, the labels and glue must be removed, and the bottles must be cleaned of all contamination from their contents and oils left from manufacturing or handling.
This tutorial will show you another method how to prepare your bottles for Water Rocket Constrction. This involves removing the labels and adhesive from the bottles and making sure there are no oils on the bottle. Failing to do so can result in the rocket leaking or exploding under pressure, due to contaminated splices.
What good is building a water rocket if you have no way to launch it? The launcher we will be constructing is a variation of the Clark Cable Tie launcher, as this is the most reliable launcher that is easy to make.
Revised instructions for adding the o-ring to the Clark Cable Tie Launcher launch tube which simplify the build and improve the design. We have put a lot of effort into simplifying the design to remove steps which involve precise measurements and part placement, to maximize the ease of construction.
This tutorial shows how to add a Clark Cable Tie Release Mechanism to the 22mm Launch Tube fabricated in the previous tutorial. This tutorial shows the newly revised and simplified instructions for making the release.
This quick tutorial showing how to make a compatible water rocket launcher that uses a gardena hose quick release connector for the release mechanism. This type of launcher also works with any standard gardena nozzle in addition to our 3D printed nozzle design. If you have all the materials on hand you should be able to build this launcher in an hour or less and be out launching water rockets in no time!
The ServoChron™ is a low cost time delayed dual servo controller designed for use as a parachute deployment or staging mechanism for Water Rockets. There are other potential applications for the ServoChron™ as well. The core of the ServoChron™ is the Texas Instruments MSP430 LaunchPad. This $4.30US board is an inexpensive microcontroller hobbyist experimenting platform that you load our FREE application firmware into with a USB cable. The FREE ServoChron™ application firmware file created by U.S. Water Rockets turns the MSP430 LaunchPad into a user programmable dual servo deployment system timer/controller.
This tutorial will show you have to construct a very reliable and lightweight acceleration switch which you can use to activate electronic systems on your rocket such as a ServoChron™ 2 Dual Servo Actuated Parachute Recovery System.
A strong and reliable parachute design is very important to anyone wishing to develop a water rocket with a recovery system. Any system from a simple Air Flap mechanism to the sophisticated ServoChron™ electronic deploy system relies on a well made parachute. This tutorial will reveal the secrets to easily making a parachute that will safely recover your water rockets.
Since it is the key to safely recovering a rocket and payload and all the time, materials, and labor that went into building them To insure the safe recovery of our fragile and expensive experiments and payloads, we decided that we needed to invent a parachute system that was more reliable than anything ever flown before. We dubbed this new design the "USWR Radial Parachute Deployment System", and it is a radical departure from traditional systems, because it relies on only one moving part. The system we designed met that goal and also has a number of other advantages over previous systems.This system is less expensive and time conuming to build, has less moving parts, and can be located more places on your rocket.
The objective of this tutorial is to demonstrate how to build a completely new type of parachute recovery system for water rockets. This system was developed to fill the need for a reliable parachute recovery system that could be made from common materials which was very easy and fast to make. Historically, ease of assembly and reliability have been mutually exclusive goals. This prompted U.S. Water Rockets to take a "clean slate" approach to the problem. This tutorial will explain how to construct the latest version of the U.S. Water Rockets Axial Parachute Recovery System.
The Hybrid Deploy System is our latest idea for improving water rocket systems to make them more reliable and easier to build. This system improves upon our previously published designs known as the Axial Deploy System, and Radial Deploy System. By combining the ease of construction of the Radial Deploy System, with the heavy duty capacity of the Axial Deploy System.
This tutorial will show you have to construct a very reliable and lightweight acceleration switch which you can use to activate electronic systems on your rocket such as a ServoChron™ Single/Dual Servo Actuated Parachute Recovery System.
In order to create larger Water Rockets with bigger pressure chambers than afforded by typical soft drink bottles, many enthusiasts have resorted to joining multiple bottles together using various methods which all are commonly referred to as "splicing". This tutorial will show you how to use this new method to create perfect splices that are easier to create and outperform traditional splices in both strength and appearance.
This tutorial will show you how to prepare your bottles for Water Rocket Construction. To prepare your bottles, the labels and glue must be removed, and the bottles must be cleaned of all contamination from their contents and oils left from manufacturing or handling.
Nearly every water rocket design that you can construct will involve some sort of bottle cutting. This tutorial will show you an easy method for getting perfect cuts every time.
Many teams build their rockets in this manner using a pre-manufactured commercial product used in school science experiments commonly called a "Tornado Tube" or a "Vortex Bottle Connector". The commercial versions typically cost $1.00US to $2.00US each. This tutorial will show how to make them for pennies each and without the expense and time consuming process of turning them on a lathe. This method could also be applied to other size bottles such as the wide mouth bottles that sports drinks often are supplied in. These bottle connectors are useful for Water Rockets because they allow for a modular approach to be applied to your rocket design.
This tutorial explains how to create a panoramic view using some free image stitching software which you may already have on your computer and were not even aware of!
If you have hobbies which involve things that fly such as RC Planes, Drones or Model Rockets, then chances are that you've had one which you were flying end up stuck in a tree. We've had this experience a number of times in the past, and we wanted to share our Tree Recovery System with you so that you may benefit from our design. In this Tutorial we will show you how to build and how to use our design, which is easy and inexpensive to make and works amazingly well.
On September 2, 2004 U.S. Water Rockets set a new single stage water rocket altitude record with an average altitude of 1,421 feet, beating the old record of 1,242 feet that was held by Anti-Gravity Research.
On a beautiful fall day with the autumn foliage in full glory, the water rocket altitude was raised to 1,606 feet (stunning autumn foliage can be seen in the onboard videos).
After setting a record the day before, the weather conditions were conducive to another record attempt. A new record of 1,818 feet was achieved as the 2 flight average.
X-10 Water Rocket crashes and results in the total loss of a video camera and altimeter earlier today during a shakedown flight of a Water Rocket designed to set the World Record for Altitude. The launch went perfectly, but when the rocket went through apogee at nearly 1,200 feet it deployed a parachute which somehow separated from the rocket.
A recovery crew for U.S. Water Rockets successfully retrieved the World Record Holding X-10 Water Rocket from a precarious position in a tree, where it had been lodged for 3 weeks. This flight insured the development of our tracking and telemetry system.
The successful construction & testing of the remarkable new C-7 payload bay, the first ever payload section to loft a High Definition Water Rocket Video Camera
C-7 is the highest resolution Movie Camera to ever fly aboard a Water Rocket, and was designed to outperform its predecessor, C-6 in resolution and framerate. In the second round of test flights, C-7 performed spectacularly, producing very smooth clear video with every test.
The latest round of test flights which allowed ground observers to view and photograph a new design parachute in action. The entire deployment process was easily visible with binoculars from the ground, making the performance of the new system easy to evaluate. As a backup, in case the ground observations failed to produce conclusive performance data, we installed an innovative "ChuteCam" system in place of the WRA2 required Apogee camera. The ChuteCam uses a series of prisms to bend light and give the ChuteCam a reverse angle view, perfect for observing the parachute unfurling behind the rocket after deploy.
While attempting to set a new WRA2 record altitude, parachute failure dooms X-12 and inspires herculean data recovery effort to recover the video from the destroyed camera.
Although not an official record due to a second flight did not occur due to lack of daylight, X-12 becomes the first Water Rocket ever to surpass 2,000 feet.
X-12 reaches an unprecedented altitude of 2,088 feet (636 m) on a clear summer afternoon with great visibility and bright sunshine. Unfortunately, when the rocket was recovered the water tight bulkhead seals of the payload section appeared to have cracked under the tremendous acceleration of launch and allowed water to fill the electronics bay upon splashdown.
Launch Report of our X-12 Carbon Fiber High Pressure Water Rocket conducted to test our new HD camera and electronics payload during freezing cold weather conditions which resulted in a near disaster when the parachute failed, only to be saved at the last second by a tree.
Our B-2 Water Rocket was test flown with an unofficial word record of 7 onboard cameras in order to record video of a test of some enhancements to our free ServoChron Servo Deploy Timer Software, and our newly invented Axial Parachute Deploy Recovery Ejection System. This Launch Report contains the details of the launch and the results of the flight, including failure analysis and data logs.
The dual deploy system proved to be a resounding success and a quantum leap in safety. If either one or even both of the parachutes became tangled or failed to inflate, the separate rocket sections would be too unstable to fall ballistically to the ground. Instead, the sections would tumble slowly down, reducing the chance for injury or property damage on the ground due to a "lawn dart".
Water Rocket launcher mechanisms are an important area of Water Rocket design which has received almost no attention by researchers for more than a decade. This Research and Development article introduces our completely new launcher design to the water rocket community, and the history of the evolution of this radical new design.
A rocketeers worst nightmare is a lost rocket, to combat this we designed our own telemetry and tracking system. A ground test of our new telemetry and tracking system
To construct a world record water rocket, we needed to do many pressure tests. On this test the compressor failed and caught fire. Then the test vessel self launched at 300PSI!
Does a water bottle rocket explode because the plastic bottle heats and softens when the air inside is expanding and stretching the plastic? We wanted to find out. The purpose of this experiment is to determine if bottle burst pressure is reduced because of the heat generated by the stretching bottle as it expands.
As early as 2003, we were experimenting with ways to get outside views of our water rocket. Back then we had been flying a camera inside a payload compartment that was meant to separate from the pressure vessel at apogee. This article shows the development of a new system which would record the entire rocket for the entire flight, rather than just the descent of the pressure vessel.
At that time, basic ordinary video cameras capable of shooting 3D were quite costly (and they never came down in price since 3D never caught on in a big way). Therefore, we decided the only way to accomplish what we wanted was to build a 3D Camera Rig that would allow us to use our specialized cameras to achieve the goal. The way to accomplished this is to somehow use two similar cameras in tandem to capture photos and videos for each eye, and then merge them in software to create 3D output.
We wondered what the view would be like to a person standing on the tip of a Water Rocket as it was launched hundreds of feet into the air, so we came up with an idea to make a tower to mount a camera on the top of a Water Rocket, so we could find out what it would look like from that point of view.
This tutorial will show a clever trick which will make it extremely easy for anyone of any skill level to remove the male headers that are installed on the MSP430 LaunchPad without damaging the circuit board, and replace them with the female headers provided.
This tutorial shows how to modify your MSP430 LaunchPad so that you can use it with both Breadboards, and BoosterPacks. This simple modification is very easy and costs almost nothing. You can have the best of both worlds by adding these "Horizontal Stabioizers" to your MSP430 LaunchPad.
This tutorial shows how to modify your MSP430 LaunchPad so that the removable jumpers will not come loose if your MSP430 LaunchPad is subjected to high accelerartion or vibration forces. This simple modification is very easy and costs almost nothing.
This archive contains the MSP430 Application UART driver file necessary to communicate to the UART on the MSP430 Launchpad. MSP430 projects which communicate to the PC will use this driver.
The ServoChron™ is a low cost time delayed single/dual servo controller designed for use as a parachute deployment or staging actuator mechanism for Water Rockets, or Water Rocket Propelled Vehicles.
There are other potential applications for the ServoChron™, but this document focuses on the Water Rocket single/dual parachute deploy application. The ServoChron™ was created specifically to make servo controlled recovery and staging mechanisms easy to build, and affordable or everyone.
Note: this manual includes the ServoChron assembly, programming and operating manuals into one convenient file. This manual supersedes the previous revisions.
A type of Water Rocket launcher that has been popular for well over a decade uses a garden hose quick release connector for the launcher mechanism. These connectors are often called Gardena connectors because of a popular brand of connector that these launchers and nozzles were made from. We used a CAD program called Alibre to create the custom nozzle object, and then printed it on a Rostock Max V2 3D Printer. We have also shared the 3D file for this custom 3D nozzle on thingverse.
We put our new 3D Printer to use making our fin brackets, but there's no reason something similar could not be made from scratch using fiberglass, plastic, wood, etc. The 3D Printer just makes producing a lot of brackets as easy as pressing a button, walking away, and coming back later to collect the parts. Using this technology also allows us to configure the printer to print the brackets as hollow shapes, meaning that they are very lightweight.
U.S. Water Rockets is proud to release this nearly ¼ Scale accurate droid replica for 3D printing. This replica robot from the Star Wars Universe was designed to be the most detailed and accurate 3D Printable Astromech droid you can print, with exceptional detail lacking in other printable models.
U.S. Water Rockets is proud to take fin construction to the next level, by using 3D printing technology. Our initial effort resulted in a set of fins which are joined together by a cylindrical section that holds them in perfect alignment. This arrangment is commonly referred to as a "Fin Can".
A lighter rocket will fly higher. Removing excess weight is one of the simplist ways to make your water rocket fly higher. This tip will show you how to make your water rocket, payload bay, camera, and deployment mechanism lighter.
Our team was recently asked to assist some students participating in a water rocket distance competition held by their school. We had never done any experiments in achieving maximum distance, so we were excited by the prospect of applying our experience in setting world records for altitude, as well as the chance to work with students in the STEM field.
Have you ever wanted to use an electronic altimeter to find out how high your rockets fly, but you have found that the commercially available altimeter products are too expensive? U.S. Water Rockets proudly presents the LaunchPad AlTImeter, a very low cost model rocketry peak recording altimeter with optional apogee detect output and servo motor control connection. With this "Do it yourself" project, you can save close to 80% or more of the cost compared to commercially available altimeter systems.
The ServoChron™ is a low cost time delayed single/dual servo controller designed for use as a parachute deployment or staging actuator mechanism for Water Rockets, or Water Rocket Propelled Vehicles.
Note: this manual includes the ServoChron assembly, programming and operating manuals into one convenient file. This manual supersedes the previous revisions.
This archive contains the MSP430 Application UART driver file necessary to communicate to the UART on the MSP430 Launchpad. MSP430 projects which communicate to the PC will use this driver.
The ServoChron™ is a low cost time delayed single/dual servo controller designed for use as a parachute deployment or staging actuator mechanism for Water Rockets, or Water Rocket Propelled Vehicles. Note: this manual includes the ServoChron assembly, programming and operating manuals into one convenient file. This manual supersedes the previous revisions.
This archive contains the MSP430 Application UART driver file necessary to communicate to the UART on the MSP430 Launchpad. MSP430 projects which communicate to the PC will use this driver.
Version 2 of the 808 Keychain camera Type #11 Firmware file enabling the "continuous recording" feature. This firmware adds the following:
a) The camera will not split recordings into 20 minute clips, it breaks recordings up into 4GB segments instead.
b) The timestamp is disabled.
c) If the battery dies, the last clip is properly saved.
NOTE: This firmware works on all models.
U.S. Water Rockets has just announced a newly created photo documentary journaling their Experimental Water Rocket Launches in the form of a Microsoft Windows Compatible Screensaver for all PCs. The new screensaver details many of their flights and contains their world famous Fall Foliage Aerial Photos, which were shot in the peak of the leaf season in northern New York State. These Screeensavers are simply loaded with breathtaking views from high altitudes, and ground camera footage from dozens of launches that kids young, old and young at heart will enjoy.
Mysterious "Project 3000" Cold Weather Test Flight Crash Lands In a Tree
The team discusses the proper angle and location of the launch to account for the prevaling winds prior to setting uo the rocket.
Introduction:
This flight was planned in advance with a number of tests and milestones which we wanted to achieve. The main goal of the flight was to test a newly constructed electronics module
which would be fitted to a brand new rocket which was under construction at the time. The new electronics module featured a completely new HD Camera which was fabricated by laying
out a custom printed circuit board using the reference schematic provided with the HD Camera chipset Evaluation board. The primary goal of the flight test was to validate the HD
camera and telemetry electronics.
The X-12 rocket was photographed after completion, and was ready for the next avaiable launch window.
A terrible snow storm 2 weeks prior to the launch provided over a foot of snow cover which would look unique from the aerial view.
This flight was planned in advance with a number of tests and milestones which we wanted to achieve. The main goal of the flight was to test a newly constructed electronics module
which would be fitted to a brand new rocket which was under construction at the time. The new electronics module featured a completely new HD Camera which was fabricated by laying
out a custom printed circuit board using the reference schematic provided with the HD Camera chipset Evaluation board. The primary goal of the flight test was to validate the HD
camera and telemetry electronics.
The electronics module also featured an aerodynamic fairing which housed a "first surface mirror". The fairing was needed to help reduce the aerodynamic drag of the mirror and protect
it from scratches. Scratching is seldom a problem with the type of mirror most people are familiar with because the glass protects the reflective silver coating, but we chose a first
surface mirror for this rocket because the outer layer of the mirror is the reflective layer, which eliminates ghost reflections from the glass surface of the standard mirror normally
used. The drawback of the first surface mirror is the coating can be scratched easily, hence the need for the protective fairing. The fairing could be installed or removed using
nylon screws, so the view from the HD camera could be sideways or reverse if the mirror was left off or installed.
The USWR primary launch site can be seen in in the background from this altitude.
The fresh snow cover provided a new view that was never seen from a water rocket before.
The photos look greyscale except for the evergreens and the road below.
The reverse angle produced by the mirror was not necessary for the rocket to achieve the goals we had designed for it, but we felt that a reverse angle would be more interesting, and
was a perspective that few water rocket videographers were recording at that time. The reverse angle was so new to the team that at the last minute we realized that the secret of our
launcher design would be plainly visible in the reverse view and we improvised a solution by covering the split collar launcher (which we recently released to the general public at
the following link: USWR Split Collar Launcher
Construction Tutorial) with a garbage bag.
For this flight, we chose to use our X-12 Water Rocket, because it is more powerful than X-10 and it would be a better representation of the forces the payload module would have to
endure on the future rocket it was built for, An aerodynamic fairing was built to adapt the narrower T-12 based FTC tube size of X-12 to the larger payload module diameter.
The stripped down camera reference design shown here also incorporates the tracking transmitter we use to locate lost rockets.
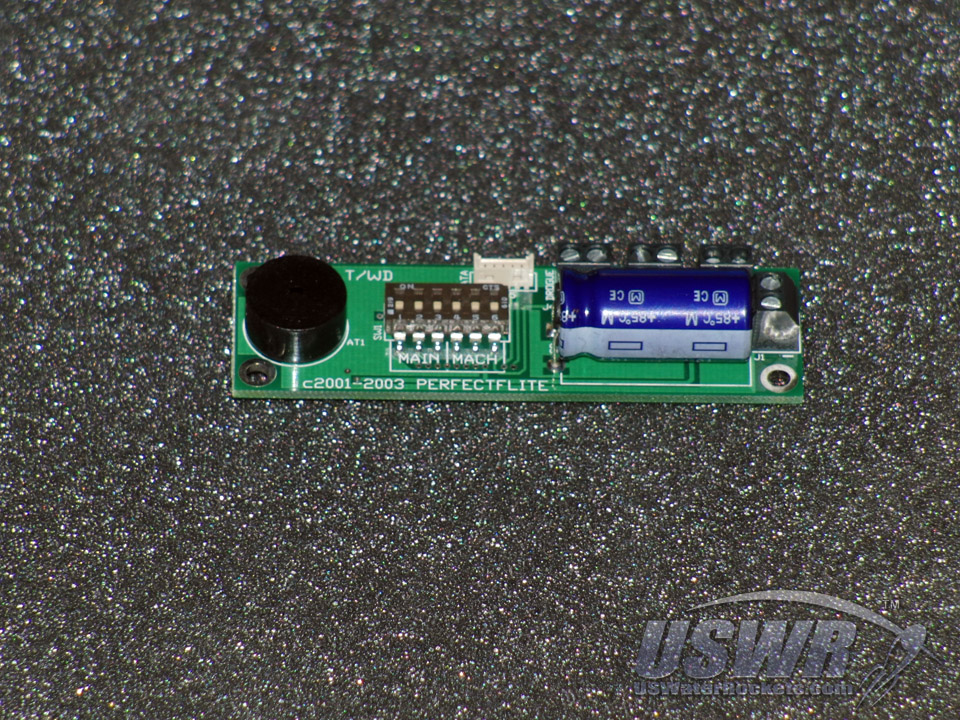
The flight is recorded using a Perfectflite Altimeter.
The rearward looking HD video was captured using a First Surface Mirror, which was mounted in a custom made fairing to protect it from scratches and improve the aerodynamics of the rocket.
The completed payload section used a reducing transition section to adapt the larger diameter payload to the narrower rocket used in these test flights.
Just prior to pressurization the new electronics payload section of the rocket is shown in this still photo.
In addition to testing the new electronics module, another goal of the launch was to see if we could successfully launch the rocket in extreme cold climate conditions. To do this
with a water rocket we realized that the issue of the rocket freezing on the launcher would be a distinct possibility, so we decided to dilute the water reaction mass in the rocket
using windshield washer fluid typically used for automobiles, since this liquid is designed to be an environmentally safe antifreeze. The Temperature at the time of launch was 20F
(-7C), making the antifreeze a requirement. We discussed using salt as the antifreeze, but we were not sure if salt water would corrode the release clamp or any of the brass fittings
on the launcher, so we decided against using salt.
The launcher base incorporates a high pressure quick connect so that the launch tube can be changed instantly from one rocket to another. This also allows the rocket to be prepared in the horizontal position and mounted to the launcher just prior to launch.
The launch tube and rocket are liften into position as a single unit and locked to the quick release on the launcher base.
Once locked into place, the rocket is supported and guided by the internal launch tube.
The Split Collar Release Mechanism can now be clamped to the rocket.
Washer fluid was used to prevent the water in the rocket from freezing in the cold weather.
The rocket was then prepared for launch, which involves folding and packing the parachute under the nosecone, and then filling it with reaction mass. Once filled, the launch tube
assembly was slid into the nozzle to prevent the water from draining out, and then once this is done the batteries were connected. After these pre-flight steps, the rocket and launch
tube assembly was carried in a horizontal position to the launcher base, where the camera was manually started and the rocket/launch tube assembly was installed on the plumbing using
a high pressure hose quick connect. The ability to work on tall rockets by mounting the release mechanism on a removable launch tube makes the preparation tasks much easier because
no ladder is needed to access the electronics and deploy systems which are about 9 feet off the ground when installed on the launcher base. The quick connect allows the use of
multiple sizes and different types of launch tubes with a single common launcher base. The advantages of this type of launcher were revealed when the video of this project was
uploaded to YouTube in 2009, and the benefits were immediately seen by viewers who were inspired to adopt similar concepts for their own launcher designs.
The secret locking pliers component of the split collar release are clearly visible in these never before seen captures from the onboard HD camera.
Another newly released image shows more images of the formerly top secret split collar launcher.
The formerly top secret launcher was covered with a plastic bag prior to launch, so that the onboard video could be shared with other teams without revealing the secret launcher design.
The launcher release is partially visible as the rocket launches, but was deemed to be obscured enough to share.
The pressurization went well without any unusual incidents, which were perhaps expected a bit because there was concern that the pressure vessel would be more brittle in the cold
temperature. Thankfully, the launch pressure was obtained without trouble and the rocket launched. Then the trouble began.
X-12 has been connected to our compressor and is being filled with tremendous pressure.
This still frame from the launch pad camera shows our innovative Split Collar launcher partially exposed as the cover begins to pull off as the rocket is launched.
As the rocket launches, the locking pliers that form the core of the split collar launcher are visible in this still frame. Also note the pressure is so extreme that the launch tube suffers extreme flexing.
After the launch, the recovery crew begins a long hike trudging through deep snow to recover X-12.
It is clear from this image that one panel of the cross form parachute has turn off, which explains the rapid descent. Tangling in the tree branches saved the rocket from smashing into the snow covered frozen ground.
After flying to an apogee of 1,686 feet, the parachute was deployed. From the ground view, the rocket seemed to be coming down visibly faster than it usually descends. At that time,
we thought that the parachute shroud lines had become entangled and were preventing the parachute from fully opening. Since we usually launch this rocket over a body of water, a
tangled chute does not present a large concern because the rocket can survive a hard landing on the water, but in this case there was concern because the rocket would be hitting the
ground. In the final analysis, we determined that the parachute never tangled, but rather it ripped in two pieces once it was deployed. We believe the film used to make the parachute
was stiffened by the cold and it essentially started tearing when it inflated. Thankfully, the parachute did not split evenly in half and the larger portion that was intact was able
to slow the rocket from a free-fall to a fast but controlled descent. The rocket would certainly have suffered bad damage when striking the frozen ground, but for a very lucky bit of
bad luck... the parachute snagged in a tree before the rocket could hit the ground.
This altimeter graph shows the altitude over time of the complete flight, including the point where the parachute tears and the descent accelerates (about 13 seconds into the flight).
After an hour or so of different attempts to reach the rocket, it finally was dislodged from the tree and recovered. The test was considered a success because the cold weather launch
was a success and not an explosion, the HD camera took HD video, and the telemetry system operated well. We were quite pleased with the results of the test, and especially with the
improvements in quality of the on-board video offered by the on-board camera.
Look for future reports from this series in the future.
If you want to build a similar release mechanism as the one featured in this article, visit: USWR Split Collar Launcher Construction Tutorial.
A tongue-in-cheek video was created to document this flight, which we uploaded to YouTube. In case you were wondering, the HUD and Warning Claxons were added to the video for
entertainment purposes. Other than the addition of these humorous elements, the on-board video is as recorded (but was flipped in software to eliminate the flip caused by the mirror). "Project 3000" Cold Weather Test Flight Video: