








How to construct an Axial Deploy System for your Water Rocket
Introduction:
The objective of this tutorial is to demonstrate how to build a completely new type of parachute recovery system for water rockets. This system was developed to fill the need for a reliable parachute recovery system that could be made from common materials which was very easy and fast to make.Historically, ease of assembly and reliability have been mutually exclusive goals. This prompted U.S. Water Rockets to take a "clean slate" approach to the problem. This tutorial will explain how to construct the latest version of the U.S. Water Rockets Axial Parachute Recovery System.



The advantages of this system are:
- Simple and fast to build.
- Eliminating unnecessary components to simplify assembly, the weight is reduced.
- Axial design is space efficient, reducing unnecessary length of the rocket.
- Simplification of the assembly by eliminating frying pan bottle heat shrinking steps makes it safer for children to build.
- Minimal number of failure points.
Downloadable template:
USWR Axial Deploy Template (159Kb pdf)Building the Axial Deploy System:
This tutorial will explain how to make the Axial Deploy System for 2 liter bottles. The design can easily be adapted to other size bottles with only minor modifications.Before you begin, you will need to obtain or make a servo deploy mechanism. We recommend the ServoChron™ system. This system can also be used with a Tomy Timer with only minor changes.
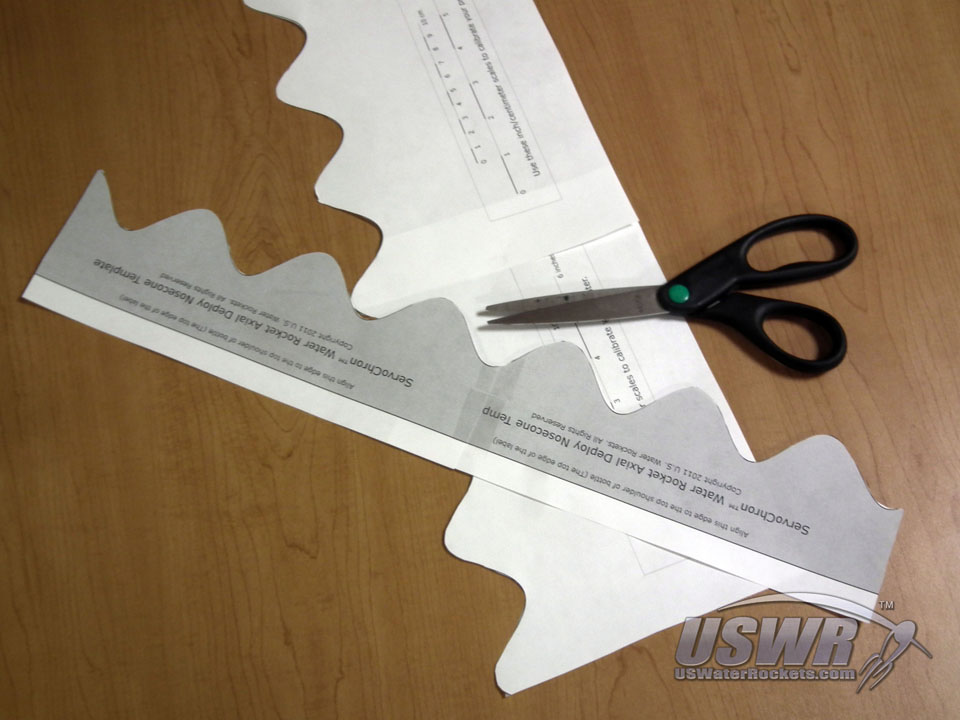
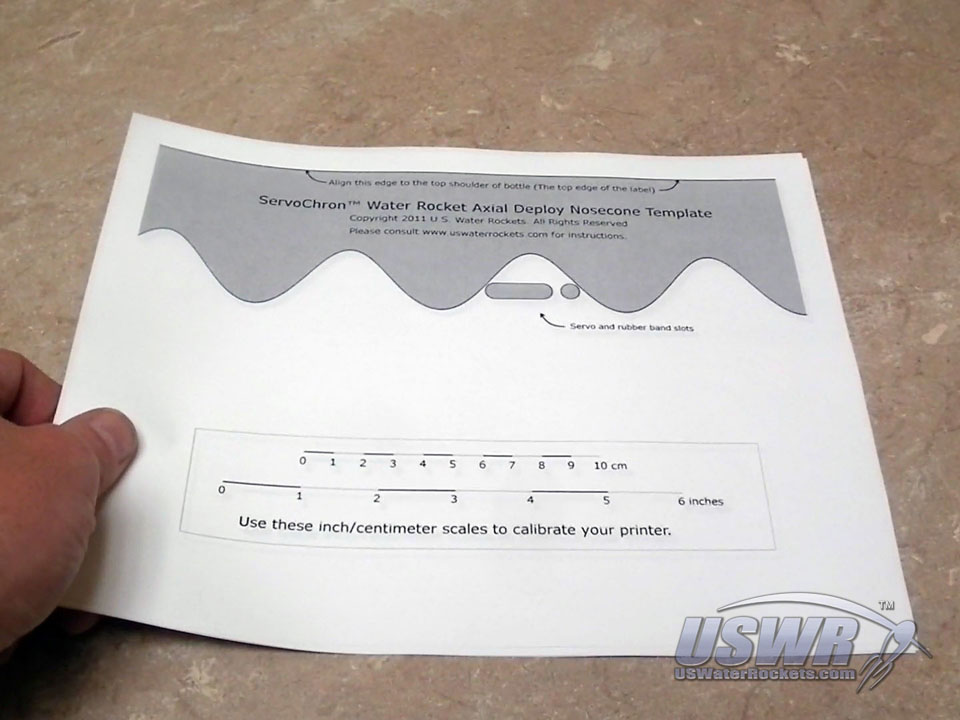
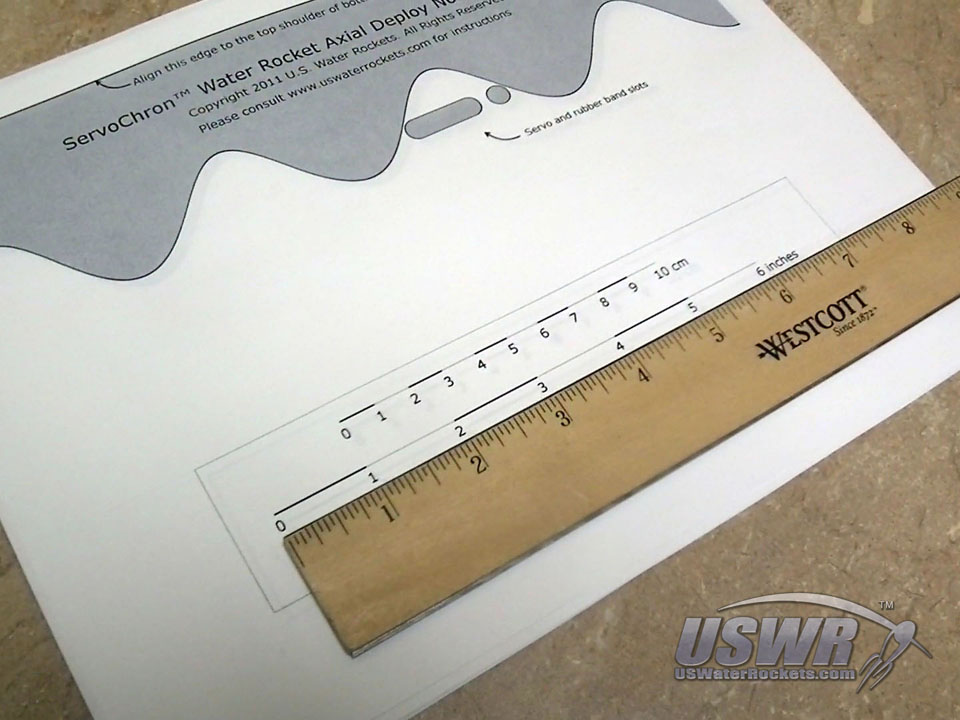
Step 1: Making the template:
You will need to print out 2 copies of the bottle cutting template for the Axial Deploy system USWR Axial Deploy Template and tape them together (a single sheet of paper is not large enough to circle a bottle) then cut out the template with a knife of scissors. You can use the scale printed on the template to make sure that your printer is properly configured to print the template to the correct size and adjust your printer settings as needed.Gallery


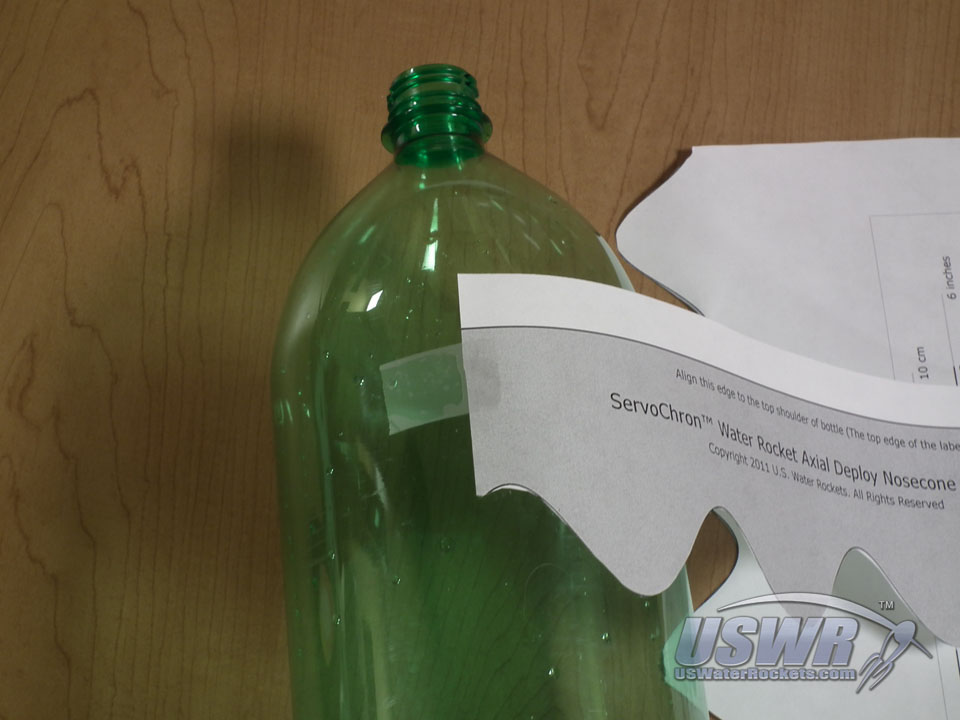
Step 2: Cutting out the parachute compartment:
Wrap the template around a bottle with the top aligned to the shoulder where the bottle begins to taper to the neck and trace the curved pattern onto the bottle with a marking pen. Cut the bottle carefully along this line, keeping the top portion of the bottle as the parachute compartment which also serves as the nosecone.Gallery




Step 3: Cutting the nosecone:
Since the parachute compartment doubles as the nose for the rocket, you will need to cut off the bottle neck, drill a hole to tie the nosecone to the parachute cord, and glue a tip on the nose. Consult the Water Rocket Nosecone Construction Tutorial for more information about making a nosecone ... .Gallery





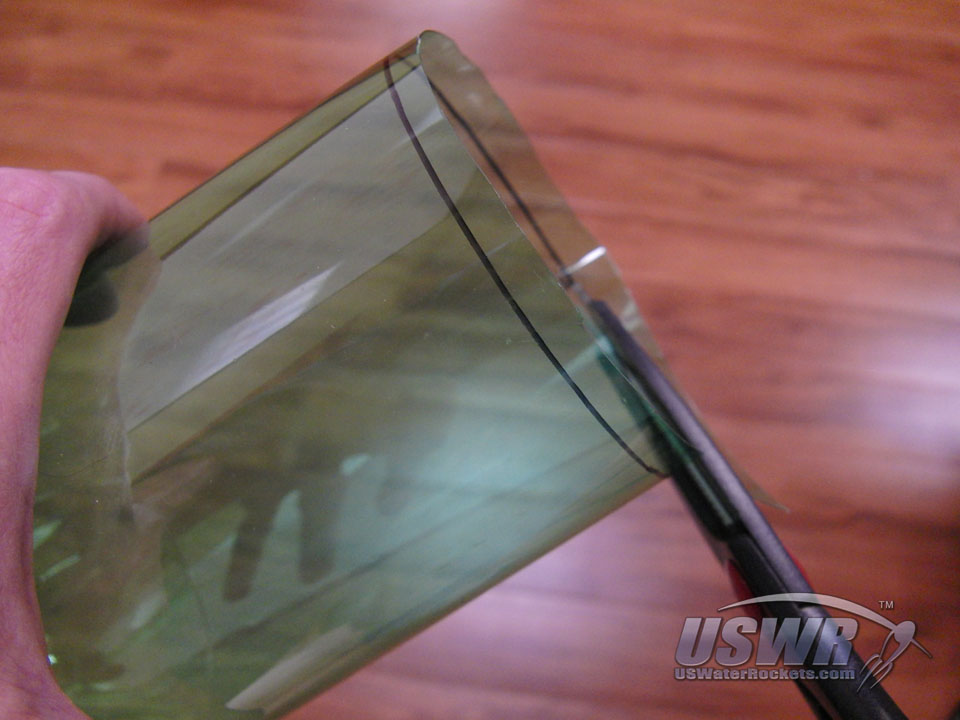
Step 4: Create the deploy spring:
A spring is needed to open the parachute compartment and eject the parachute. The spring is made by cutting two rings from a bottle and putting them together to form one thick ring about 2 inches wide. Holes drilled through each side of the spring allow the parachute line to feed through, which holds the spring in place and keeps it from separating from the rocket during deploy.Gallery






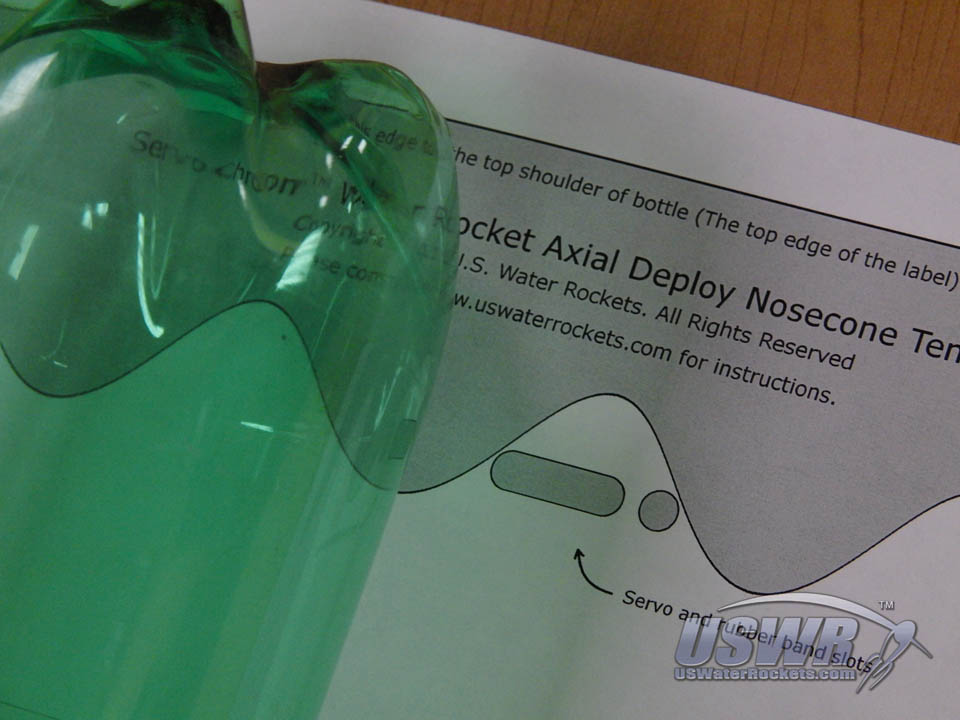
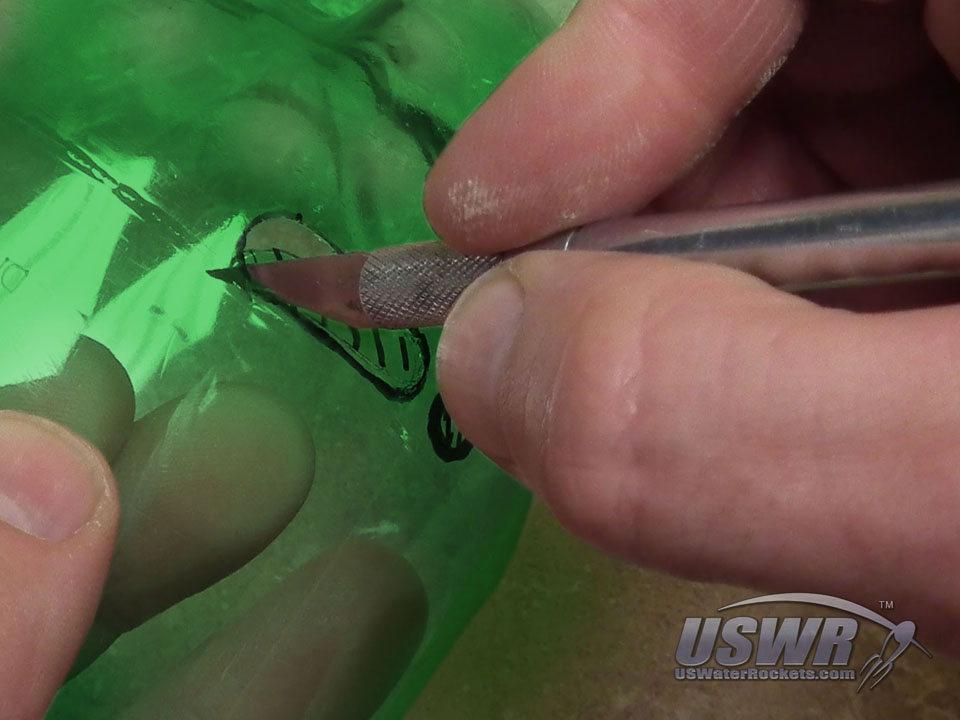
Step 5: Making the electronics bay:
The electronics bay contains the deploy electronics, servo and battery. This section is made from bottle cut to about 7 inches in length. The bay has two holes drilled through the bottle bottom for attaching the parachute and nosecone, and a hole pattern for a servo and rubber band, which are used to secure and release the parachute. The hole pattern is printed on the deploy template and must be copied to the bottle and then cut out using a sharp knife. To properly place the template you will fit the nosecone over the electronics bay, aligning the lobes on the nosecone with the "feet" of the compartment and then align the template with the cut edge of the nosecone and trace it.Gallery





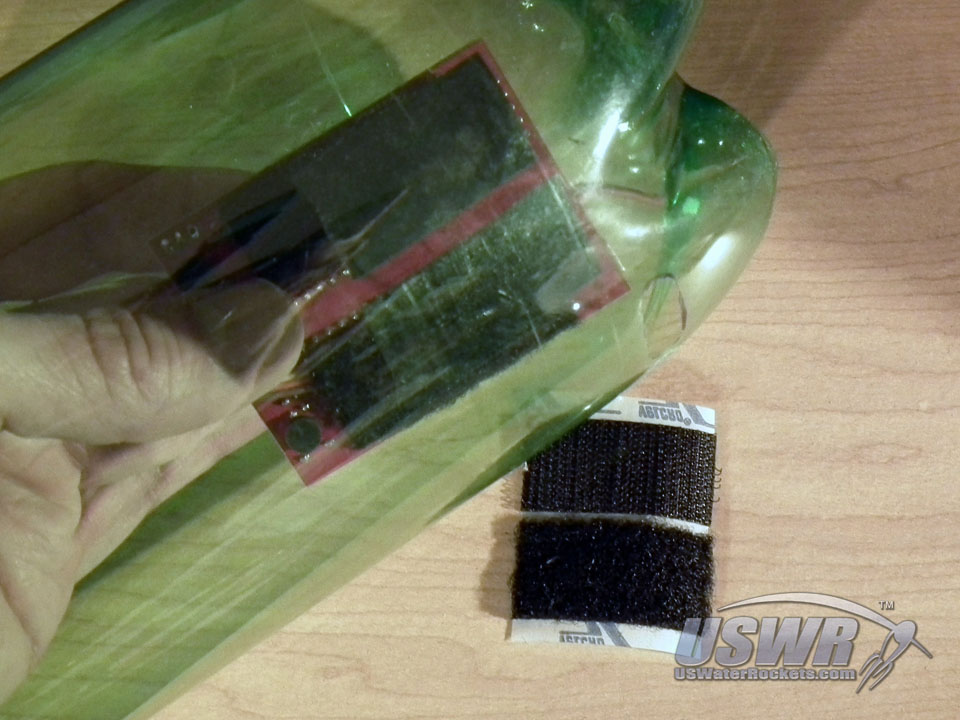
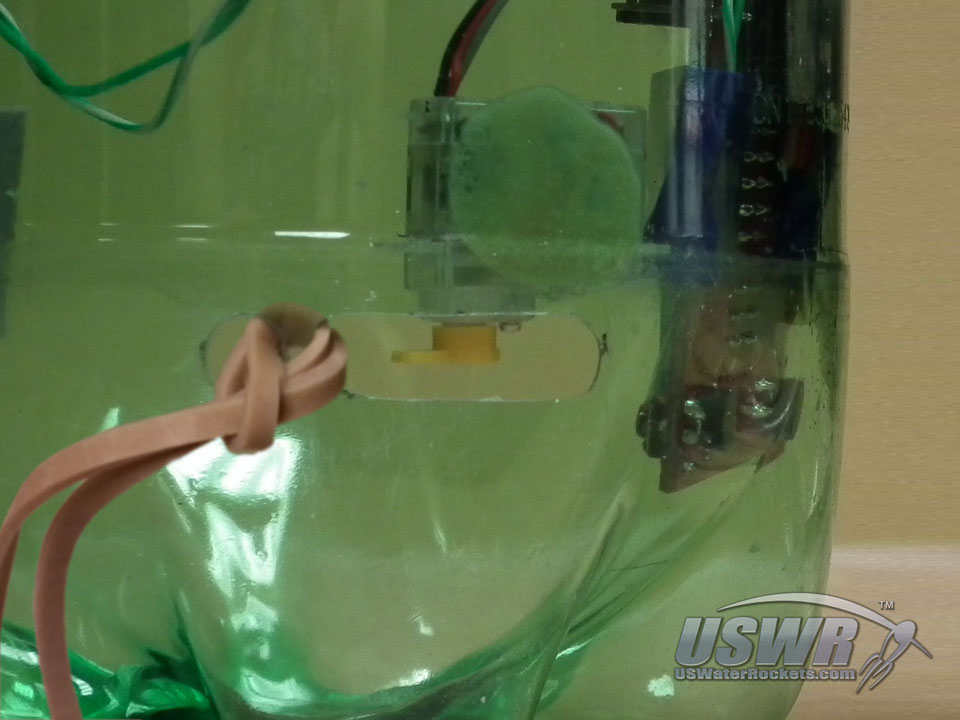
Step 6: Final assembly:
The ServoChron™ board and battery can be fixed to the inside of the bay using double sided foam tape or hook-and-loop fasteners (which allow them to be moved from one rocket to another easily). The servo motor can be attached using these methods, but we prefer to glue it in place permanently. A rubber band is tied off to the hole next to the servo, and the parachute line is tied to the two holes made in the bottle bottom. Make any holes needed to mount controls or switches and secure them in place as well.Gallery





Step 7: Arming the Axial Deploy:
To arm the system for flight, you compress the spring into the nosecone and then fold and pack the parachute into a small bundle. The nose is placed on top of the electronics bay with the parachute compressed between the spring and the electronics compartment. Rotate the nose so that the lobes on the trailing edge align with the gaps between the "feet" of the electronics bay. The nose is held in place by wrapping the rubber band around the bottle and hooking it onto the servo horn.The rubber band crosses the lobes on the base of the nosecone and also contacts the surface of the electronics bay. The friction of the rubber band holds the nosecone in place until the deploy is activated. When the rubber band is released, the spring ejects the nosecone and parachute for a safe recovery every time.
Gallery






Step 8: Finish:
Place the completed deploy system on the top of your water rocket and secure it with tape or any other suitable method. The system is now ready for flight. On a typical flight the electronics are configured to the launch configuration and powered up at this point.Once the rocket is pressurized it is launched and will carry to rocket to the maximum altitude, at which point the servo will release the rubber band and this will take away the friction which holds the nosecone in place, releasing the parachute for safe recovery.
Gallery


 Water Rocket Axial Parachute Deploy Mechanism by
U.S. Water Rockets is licensed under a Creative Commons Attribution-NonCommercial 3.0 Unported License.
Water Rocket Axial Parachute Deploy Mechanism by
U.S. Water Rockets is licensed under a Creative Commons Attribution-NonCommercial 3.0 Unported License.